
Issue 3
One of the most advantageous applications of non-destructive pavement deflection testing is to determine the modulus of pavement layers and subgrade using back-calculation. The back-calculation of modulus can be achieved using an iterative process. This process requires an initially assumed layers’ moduli that will be continuously adjusted during the iterations until the best match is obtained between the measured and predicted surface deflection values (Austroads 2019a).
Several methods have been developed for the back-calculation of pavement layers’ moduli over the last few decades. ARRB developed one known as EfromD1 (Elastic modulus from Deflections) model (Potter 1989), which adopted the linear elastic model CIRCLY for the pavement deflections calculations. The implemented iterative procedure in Efromd1 continues until the desired agreement between the predicted and measured deflections is achieved or until no better match to the measured deflections can be obtained (Vuong 1989). However, a notable limitation of the EfromD1 model was that if the initial layers’ moduli to commence the iterative procedure were not selected appropriately, the predicted moduli could be related to a local minimum that were not necessarily the best match with the measured ones.
To address this limitation, ARRB developed EfromD2 model (Vuong 1989). Similar to EfromD1 model, EfromD2 also used CIRCLY during the iterative process. However, a different iterative method to back-calculate the pavement layers’ moduli was employed in EfromD2.
In 2003, Transport South Australia commissioned ARRB to improve the back-calculation method. Hence, ARRB developed the EfromD3 model that combines the EfromD2 and EfromD1 iterative techniques. This resulted in a more robust prediction of pavement responses while having a reduced computing time compared to the EfromD1 model. EfromD2 and EfromD3 have been used by several Australian road agencies for over a decade, which showed them to be satisfactory.
This article provides an overview of a part of a study conducted by ARRB for the Austroads project TT2044 entitled Improved Methods of Using Pavement Deflection Data in the Design of Rehabilitation Treatments (Austroads 2019a). One of its objectives was to develop an algorithm for the back-calculation of pavement layers and subgrade moduli for future use in the mechanistic-empirical procedure of pavement rehabilitation design, as presented in the Guide to Pavement Technology Part 5: Pavement Evaluation and Treatment Design (Austroads 2011).
For this project, an improved back-calculation algorithm was developed. Developing an algorithm was considered a critical and effective step for the possible future development of new back-calculation software. The algorithm was entitled the ‘Austroads back-calculation algorithm’ or ‘AustBack’. In this algorithm, a detailed step-by-step procedure demonstrating the mathematical expressions and the iterative techniques used in the back-calculation method was presented.
The AustBack back-calculation algorithm employed the EfromD3 principles, which basically incorporated the mathematical equations and steps in EfromD1 into the iterative techniques in the EfromD2 model.The required steps and sequences were therefore derived from the EfromD1 and EfromD2 source codes. As a result, the algorithm consisted of two main stages representing the iterative techniques for back-calculation based on these two models. The EfromD1 model implemented the Rosenbrock function minimisation algorithm (Machura & Mulawa 1973) to generate new values for material properties throughout the iterations. The Gram-Schmidt orthogonalisation procedure (Arfken, Weber & Harris 2012) is used in the algorithm. The weighted sum of the squares error function is used in the EfromD1 model to quantify the agreement between the predicted and measured deflection values. On the other hand, a different iterative method using the modulus correction factors was used in EFROMD2. The correction factor was used to adjust the moduli for each layer at each iteration and was calculated from a relationship between the measured and predicted deflections.
Additionally, the algorithm was further improved by adding the following two optional features:
The AustBack back-calculation algorithm is not presented in this article. However, the comprehensive and detailed algorithm can be found in the Austroads project report (Austroads 2019a).
This study developed an approach for modelling the subgrade layer for the back-calculation process in order to improve the algorithm. The properties of the in-situ subgrade material may change with depth, which needs to be taken into account in the back-calculation model.
In the proposed algorithm, the subgrade is sublayered into three sublayers, including the top subgrade (0 to 300 mm depth below the top of the subgrade); the intermediate subgrade (300 to 800 mm depth); and the bottom subgrade sublayer (below 800 mm, semi-infinite). This sublayering method is consistent with the approach used in Austroads (2019b).
Additionally, using the evaluations conducted to assess the likely variation of modulus with depth, moduli constraints for subgrade sublayers were applied in the algorithm. The evaluation was based on the surface modulus, or ‘composite modulus’, calculated from the Boussinesq equations (Ullidtz 1987) using pavement surface deflections. Horak (2007) discussed that the composite modulus, at a reasonably large distance from the edge of the FWD loading plate, can be used as an indicator of the subgrade material behaviour. The slope of the composite modulus can also represent the expected changes (increase or decrease with depth) in the subgrade sublayers moduli. The details of the composite modulus and the associated assessments carried out in this project can be found in Austroads (2019a).
Finally, the moduli constraints for the subgrade layer were added in the algorithm by applying a gradual change of modulus with depth between the three sublayers using a linear relationship. This avoided having the unrealistic back-calculated moduli for the three sublayers or a significantly higher/lower modulus in the intermediate subgrade sublayer compared to the bottom or top sublayers ‘sandwich effect’.
In the mechanistic-empirical design of new flexible pavements, the total thickness of the granular base and subbase layers is divided into five sublayers of equal thicknesses (Austroads 2018). The modulus for each sublayer can be determined using a modulus ratio. The ratio of moduli for adjacent sublayers can be obtained from a relationship between the modulus of the top granular sublayer and the modulus of the underlying subgrade. It should be noted that a similar procedure is used to calculate the design moduli of granular materials in the mechanistic-empirical design of rehabilitation treatments.
To further improve the back-calculation algorithm, the total thickness of granular layers was divided into five sublayers to be consistent with the approach for the design moduli determination. The model had a maximum modulus assigned to the top granular sublayer so that it was capped not more than double for every 100 mm of the granular layer. It should be mentioned that this optional feature may not be used when the modulus value of the top subgrade layer is higher than the granular layer moduli.
The developed improved algorithm was subsequently tested and verified using two selected case studies. The first case was related to ‘asphalt surfaced granular pavement’ control section as part of the research related to the performance of foamed bitumen stabilised pavements in Calder Freeway, Victoria. The second case study was a ‘thick asphalt on cemented subbase pavement’ that used the available FWD data (Austroads 2011). The objective was to assess the AustBack algorithm and to evaluate the benefits of its associated optional features to assist the back-calculation analysis.
It should be noted that the AustBack algorithm is independent of the response to load model. However, CIRCLY (Mincad Systems 2004) was used in the verification step for the adopted case studies in this project.
3.1. Input parameters
The back-calculation analysis from the FWD testing data and using the AustBack algorithm requires the user to select or input the following parameters:
The initial moduli (seed values) are used to commence the iteration procedure. Appropriate estimations of the seed values, as well as selecting a good modulus range (the minimum and maximum moduli), can improve the quality of the back-calculation analysis. The local knowledge of the pavement condition and the available laboratory characterisation data, as well as a proper engineering judgment, can be used to select appropriate input parameters for the analysis.
The project proposed a method to define the seed moduli for the subgrade sublayers using the composite modulus data. The mathematical equations to determine the initial subgrade values using the slope of the composite modulus for deflection offsets greater than the total pavement thickness were presented in this study (Austroads 2019a).
The iterative procedure of a back-calculation analysis will be completed once the predicted deflection values match the measured ones (error function below the inputted acceptable error function), or when the inputted maximum number of iterations is reached. The error function provides an estimation of the quality of the fit between the measured and predicted deflections.
The back-calculation analysis was conducted using the AustBack algorithm with and without the optional features of the ‘constraint for subgrade sublayers’ and ‘granular sublayering’. Figure 1 shows the back-calculated moduli of the three subgrade sublayers related to the first case study of ‘asphalt surfaced granular pavement structure’ with granular base and subbase. Figure 1.a shows the obtained moduli while no constraints to subgrade or granular layers were applied. Figure 1.b, on the other hand, illustrates the moduli while both granular sublayering and subgrade constraints were considered in the analysis. In this figure, top, intermediate and bottom represent the three subgrade sublayers.
The result showed that applying the two constraint options (Figure 1.b) affected the back-calculated moduli obtained for each sublayer. The modulus at chainage 140 m was clearly improved and a higher modulus for the intermediate sublayer compared to the bottom and top was not observed in that case. However, the study showed that although the subgrade constraint resulted in more realistic subgrade sublayers moduli, the error function generally increased with this option. Therefore, it is suggested to employ this optional feature when a significantly higher/lower modulus in the subgrade intermediate layer is observed compared to the other adjacent layers.
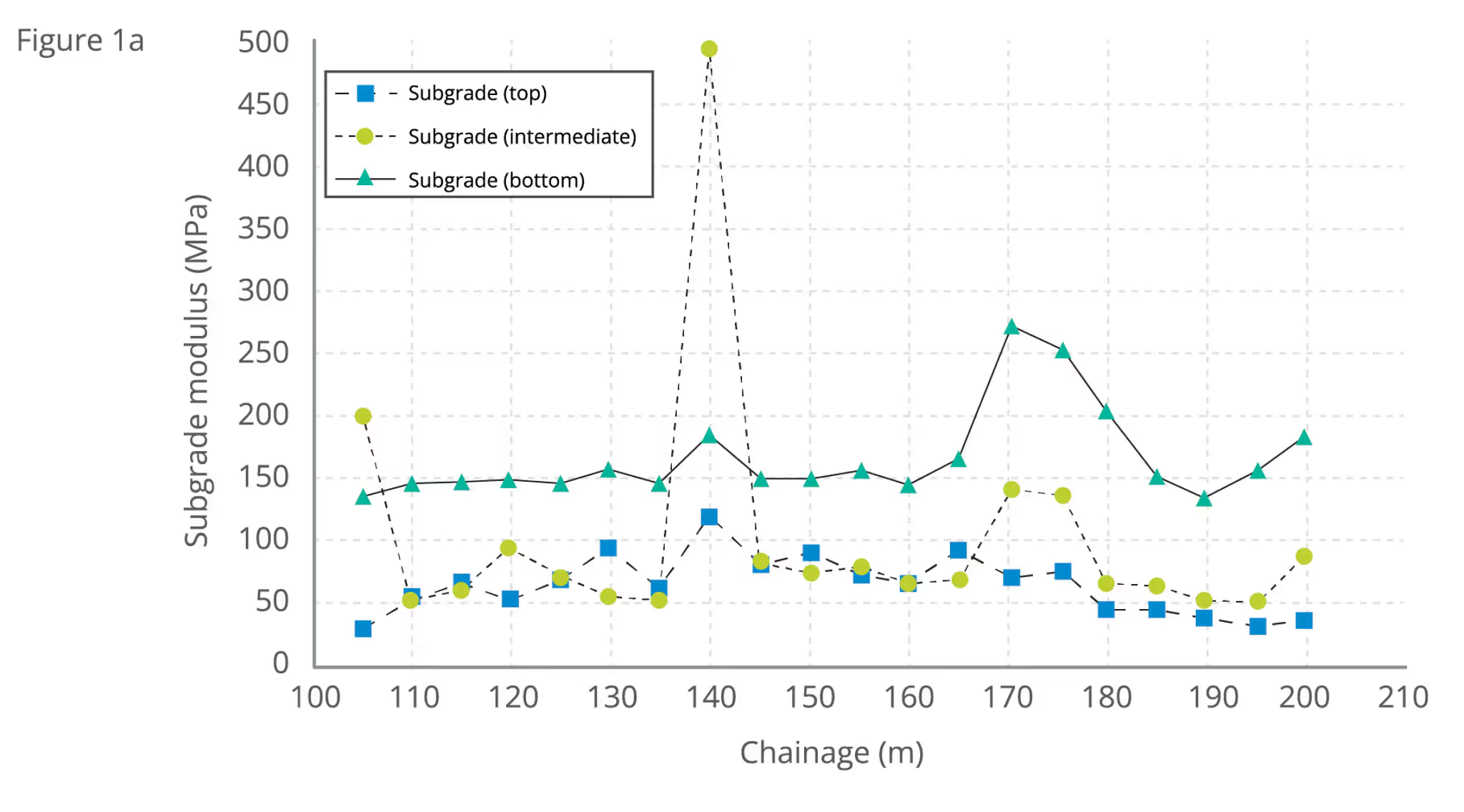
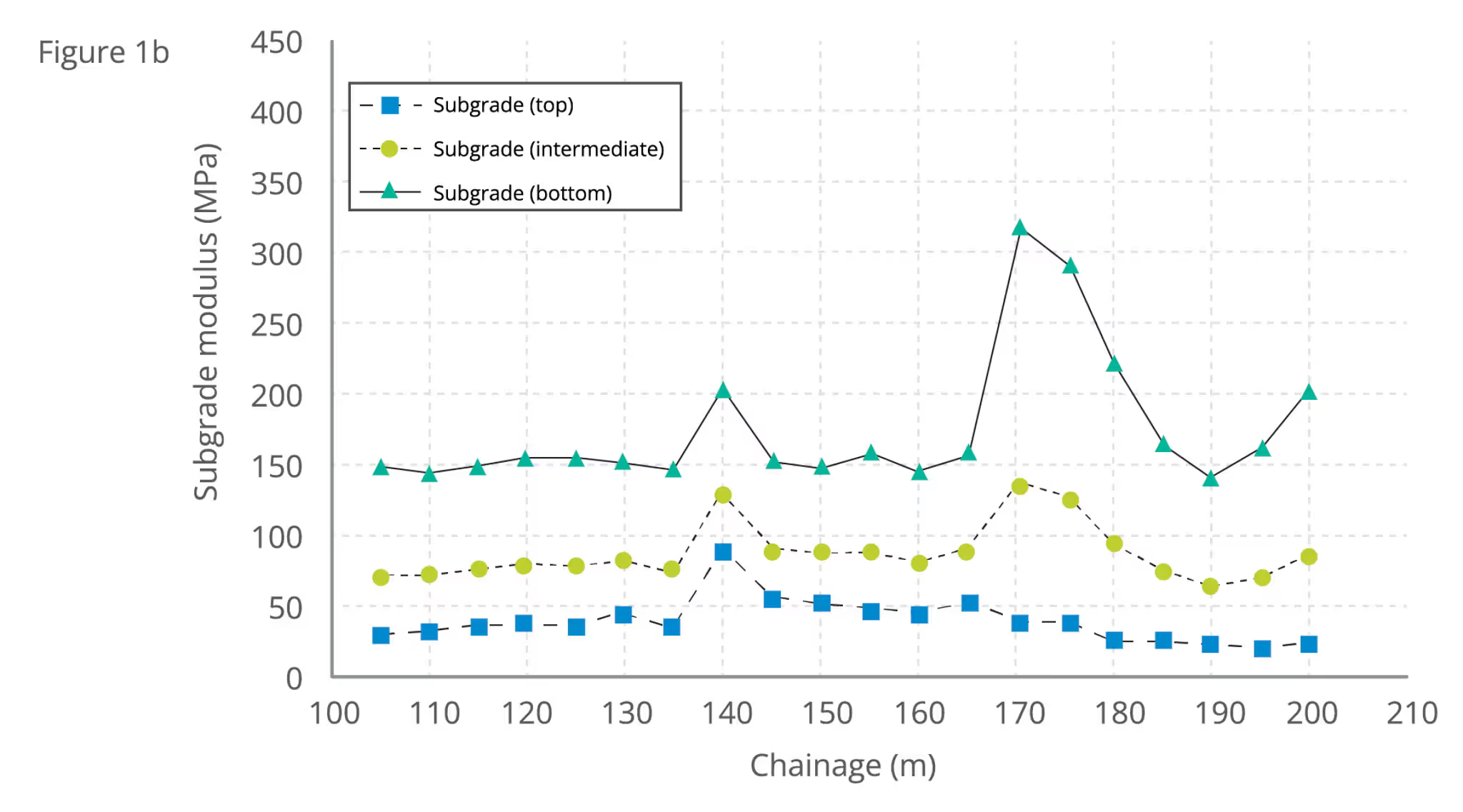
Figure 2 shows another example related to the first case study. This figure demonstrates the back-calculated moduli of granular base and subbase layer while the subgrade constraints and granular sublayering were separately applied in the analysis. In this figure, sublayering represents back-calculation analysis using the option of granular sublayering.
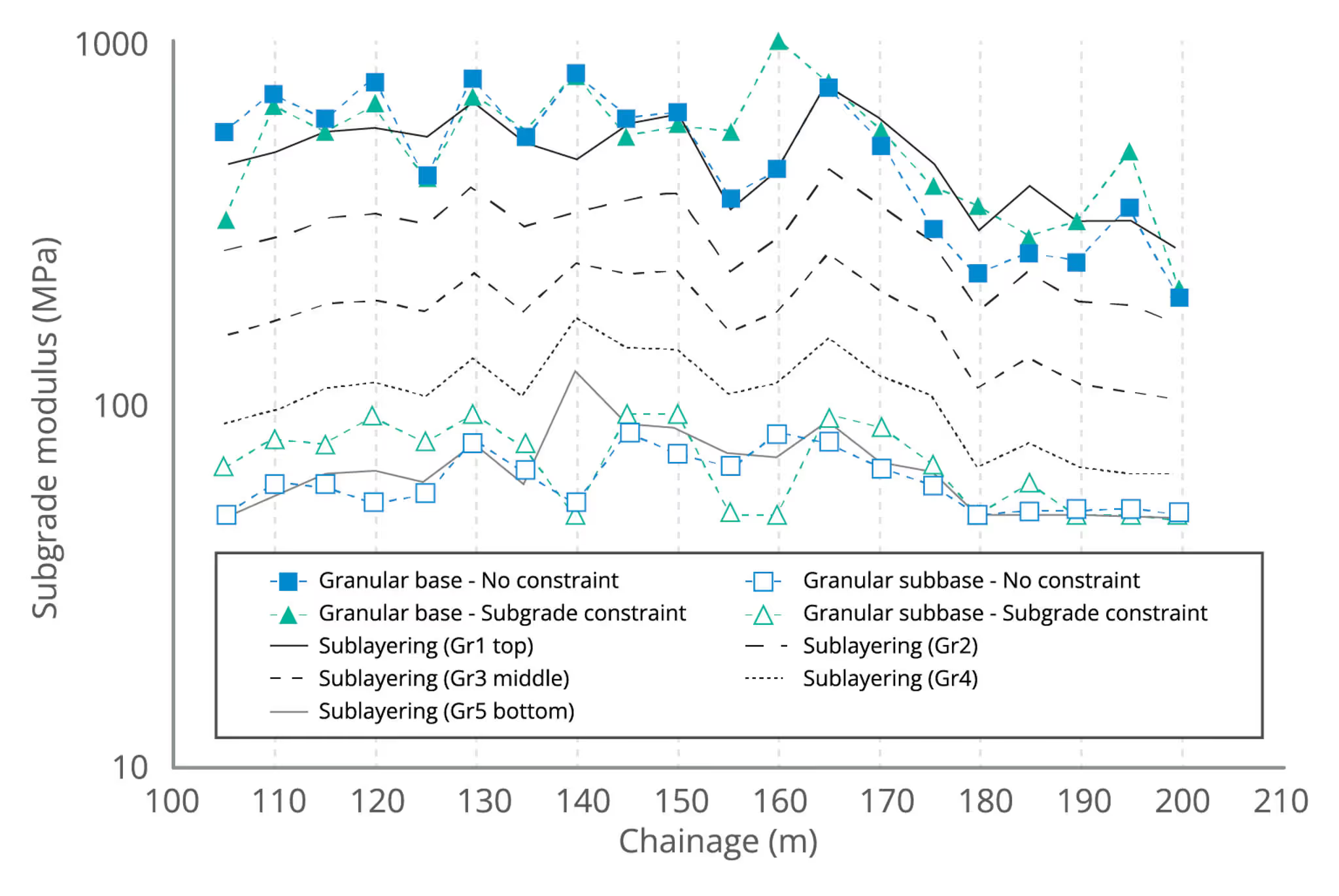
The results showed that the subgrade constraints did not have a significant influence on the final moduli obtained for the granular base and granular subbase layers. As shown in Figure 2, these two layers generally exhibited similar moduli with and without subgrade constraint.
When the granular sublayering constraint was employed, the moduli of the granular sublayers (Gr1 to Gr5) were gradually decreasing from the top (Gr1) to the bottom (Gr5). In this case, Gr1 to Gr5 generally exhibited the moduli within a similar range to the ones from the base and subbase without the constraints (see Figure 2).
Also, the analysis conducted based on the two case studies in this project showed that applying the constraints options did not generally affect the back-calculated modulus of asphalt layers.
This project developed the AustBack algorithm for the determination of pavement layer and subgrade moduli using the measured pavement surface deflections. Detailed and comprehensive step-by-step sequences of the iterative procedures, in addition to the required mathematical expressions used in the back-calculation model, were developed and presented and can be found in Austroads (2019a).
The optional treatment features of the moduli constraints for granular sublayers and the moduli constraints for subgrade sublayers were also embedded in the model to improve the algorithm. The subgrade constraint enabled the gradual change of subgrade modulus with depth using a linear relationship. The proposed granular multilayering approach was consistent with the design pavement model (Austroads 2018).
In addition, a method to determine the seed values for the subgrade sublayers was developed using the composite modulus concept, which enables the users to define appropriate input parameters for the back-calculation analysis.
Finally, the algorithm with and without the two options was tested and validated using the FWD measured deflection data from actual case studies, and the benefits of the optional features were demonstrated.
The authors wish to acknowledge the original project work that informs this article, which was undertaken for, and is detailed in, Austroads (2019).



.avif)

