A great deal has been written about ‘the future’ when it comes to a number of things, but particularly so with transport, or its ‘mobility’ embodiment. What is not always apparent is (a) how rapidly change will take place and (b) how profound change could or needs to be to realise the full potential of the opportunity.
A great deal has been written about ‘the future’ when it comes to a number of things, but particularly so with transport, or its ‘mobility’ embodiment. What is not always apparent is (a) how rapidly change will take place and (b) how profound change could or needs to be to realise the full potential of the opportunity.
Key Drivers Of Change
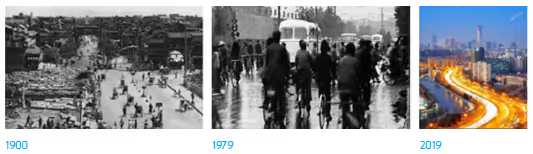
Manhattan depicts an interesting picture on the development of road operation in the past decade. The horses and carriages were still the main choice of transport in 1900, before automobile almost completely took over in just 18 years. Since then, automobile has been the most dominant mode of road transport changes that may occur to the initial composition.
Figure 1: A look on the road in Manhattan throughout the past decade
Beijing interestingly underwent a similar change to Manhattan (or the western world), yet the change occurred more rapidly within the past 40 years.
Figure 2: A similar transformation of roads in Beijing
However, a striking observation is that road operations are essentially identical despite the introduction of automobile. Extrapolating the development of Connected, Autonomous Vehicles (CAVs) in recent years, it is likely that a drastic change on how the roads would look and be operated is imminent. With some vehicle manufactures (OEMs) already predicting deployment in 2030 or earlier, it is imperative that Australia disrupts its transport to accelerate realising the benefits that CAV has to offer.
Time To Catch Up with Technology
Technology Is Not a Barrier?
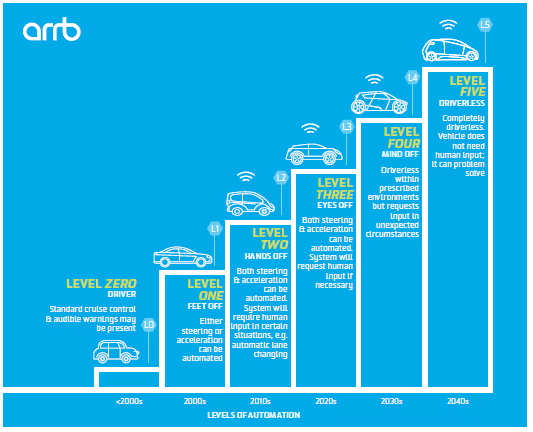
It is said connected automated vehicles are already here and will continue to improve with its automation and connectivity within the next 20 years towards full automation. The following pictogram illustrates the levels of automation and likely timing for adoption of each.
Figure 3: Estimate on timing for adoption of various SAE level of automation
However, it is not the technology, but the psychology associated with ‘driverless’ or ‘automated’ vehicles which currently is a significant barrier
Fundamental Change of Mindsets
The public in general are still wary and sceptical of the technology. A recent survey coordinated by ADVI (2017) suggests only 25% of the respondents would use a fully automated vehicle. To improve access to social & economic opportunities for mobility, trust in the technology is critical. A recent audit of the technology transport trials landscape in Australia suggests two key learnings.
The public are generally not aware of the different technologies available nor the productivity or efficiencies gain.
They are sceptical of the security, reliability, and trustworthiness of the technology.
It is also predicted that the realisation of the car-sharing model as it applies to automated vehicles in Australia will be challenged by the public. Thus, there are still some significant efforts required to shape the mindset of the public to accommodate a fully shared transport model.
Promise Of a Better Transport Future
CAV has been heralded as a means of drastically reducing on-road crashes. It was initially predicted that CAV will eliminate all human-error related crashes. (LawInfo,2017). Despite being unreasonably optimistic that rough estimate gives confidence that CAV will improve road safety and, ultimately, reduce the number of fatalities and injuries on the road. In recent years, many experts have started to form a view that realising the safety benefits of AV may prove to be a challenge, mainly due to the complexity of the operating environment in the current situation; road users’ disobedience, different driving behaviours of human drivers, and the sheer number of driving situations that will be encountered by the AV.
The benefits of active safety feature, such as Lane Keep Assist and Adaptive Cruise Control, are very pronounced due to that fact that the drivers are still “in the loop” when it comes to vehicle control and the driving task. When the drivers are disengaged from the driving task (at higher levels of driver assist and automation), their reaction time to take back control in case of fallback request from the vehicle extends significantly (Li et al, 2019). Thus, operation of AV at SAE Level 2 and/or 3, which still relies on the drivers as fallback, could be counterproductive to safety.
Beyond the need for greater trust in AV to realise benefits, there is also the need for a new operational paradigm.
A New Operational Paradigm
CAV offers the potential to operate roads more efficiently, such as:
Close-gap platooning will be able to increase the road capacity in addition to already-proven fuel saving benefit.
A complex intersection management strategy can be deployed in a 100% driverless traffic environment, reducing travel delay of up to 40%.
A more uniformly spread traffic / route assignment (both spatially and temporally), which may help reduce network-wide congestion, can be more easily implemented with the help of fully automated vehicles.
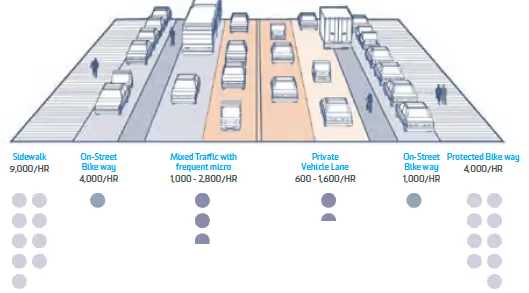
The concept of ride-sharing or Mobility as a Service (MaaS) maybe expanded to incorporate driverless vehicles, thus, the vehicle is better utilised compared to the current operational model, where a typical private vehicle may be unused 96.5% of the time-shared CAV operation model may reduce the number of vehicle up to 90% in a city centre environment. There are already several schools of thought on how to redesign street layout to facilitate the use of automated vehicle to increase road capacity. NACTO (2017) proposes a higher capacity road operation concept that relies on mass transit coupled with CAV operations for a more controlled environment to provide safety for pedestrians traffic (Figure 4).
Figure 4: A street redesign concept that emphasises on mass transit coupled with CAV for a more controlled environment (NACTO 2017)
This drastic change in road operation is theoretically achievable right now without requiring much infrastructure investment. Such a radical change requires a careful planning and a holistic approach. Australia lacks a national roadmap that outlines a holistic strategy in facing the advent of CAV. Additionally, each state and territory is often working and running trials independently without a substantial effort to collaborate.
Therefore, Australia needs a paradigm shift into a more national and holistic mindset to be able to improve Australia readiness for CAV deployments and mobility alternatives.
Other Necessary Paradigm Changes
Whether we, the public, like it or not, we are in transition to fully automated driving. It might be some years away, decades even, but the disruption will change how we interface with each other on the road, be it; vehicle to
infrastructure (V2I), vehicle to vulnerable road users
(VRU) and/or vehicle to vehicle (V2V).
To manage these disruptions, the following two key aspects are necessary to prevent another “surprised (unforeseen) disruptor” and ensuring that the advancement of technologies serve the good of the public:
• A user-centric and mobility focus
• A holistic approach
User centric and mobility focus
The aim of transport services is to move people from one activity location to another. The more traditional approach is to tackle specific cases of improvements, such as improved traffic corridor management, better intersection control, on-road public transport prioritisation strategy and scheduling optimisation.
However, this creates some gaps in a sense that these transport services, although performing well, sometimes do not seem to integrate with each other and thus collectively introduce inconvenience to users.
The future transport would need to focus on serving the needs of the user. The key learning from the recent popularity of various shared economy business models (such as Uber) is that, despite the disruption they bring, these new models better serve the needs of the users, in terms of better access to opportunities and typically at more affordable costs. In transport, this means an improvement on the accessibility of opportunities and places that users are trying to reach.
In recent years, the transport community has focussed on integration, creating a seamless, multi-modal mobility service. The increasing trend in MaaS demonstrated the importance of this seamlessness in servicing people’s journeys. The concept of mobility breaks the boundaries of the traditional transport business, which was often siloed (as illustrated in the “Physical Infrastructure” diagram in Figure 5 below). The rapid development in the IT field has disrupted this siloed approach and provided a more “horizontal” perspective (as illustrated in “Digital Infrastructure”). In order to provide the integration, there is a need for an overarching “Logical” and “Conceptual” architecture to ensure a holistic approach.
In order to achieve this integration, better planning and coordination will be required. It was stated that “a carefully planned and managed system can reduce the total number of private vehicles drastically, as well as reducing the distance they travel by 22%, and CO2 emissions by 27%” (Future of Transport, 2018). The planning needs to consider the advancement of technology as discussed above:
How do we integrate AV to fully realise its potential benefits?
How do we future proof the transport systems from technology and digital disruptions?
Necessity of a roadmap for a holistic approach
A plan inherently requires the identification an end point which we want to achieve. Many have proposed end- goals for the future transport, with various idealistic visions and/or hypothetical scenarios of the future being conceptualised. However, what usually missing is the
roadmap describing how we could achieve these end goals.
For the roadmap to be useful, it needs to identify milestones and provide a realistic plan to achieve the end goal.
With a clear plan and direction, OEMs and technology suppliers would be more attracted to invest in Australia, since they will be more confident that they will get some form of support from regulators. OEMs if so engaged, would as a group provide a realistic timeline to implement the roadmap.
With city-specific goals in a clear plan, mobility can be designed or facilitated in a way that improves citizen health, provides better education options, and creates the best opportunities for business development and liveability in general
Finally, a clear goal and plan enables the government to better educate and inform the public. This will increase their confidence and acceptance of new technologies, and in so doing, bring the public along the journey of our transport transformation.
Figure 5: Hierarchy of future mobility management. Source: ARRB
Concluding Remark
Mobility of the future has already arrived. It is inevitable now that connected and automated vehicles (CAV) are fast becoming a reality. It is known that technology will certainly play a critical role in future smart cities, but it should not be the focus. The smart cities of the future are ones which are integrated into the lives of all people, and which anticipate and ensure a safe environment.
The concept of smart mobility is already within our grasp. The next step is to have a holistic approach to mobility – shared responsibility by the government, suppliers and the people. Service-
related investments and their establishment needs to be considered just as policies and regulatory standards (if any) for services to operate within the jurisdiction. The traditional thinking of building, operating and managing transportation needs to change. The future transportation system needs to be a holistic system and not a cluster of separate partially-integrated systems.
Australia has a big challenge to reset its transport paradigm. This is not an impossible task, especially since Australia already has the relevant expertise across different jurisdictions and organisations in the transport sector; imagination and redirection of thinking are needed.
Mobility of the future has now arrived with connected and autonomous vehicles are fast becoming a reality. To exploit this Australasia must reset its transport paradigm.
References
[1] NACTO, “NACTO Blueprint of Autonomous Urbanism,” NACTO, New York, 2017.
[2] LawInfo, “Human Error Causes 94 Percent of Car Accidents,” Thomson Reuters, 9 June 2017. [Online]. Available: https://blog.lawinfo.com/2017/09/06/human-error-causes-94-percent-of-car-accidents/.
[3] Li. S, Blythe P, Guo W, Namdeo A., “Investigating the effects of age and disengagement in driving on driver’s takeover control performance in highly automated vehicles,” 2 May 2019. [Online]. Available: https://www.tandfonline.com/doi/full/10.1080/03081060.2019.1609221?af=R&.